Towards online myoelectric control based on muscle synergies-to-force mapping for robotic applications
- Post by: Antonio Frisoli
- 4 June 2021
- Comments off
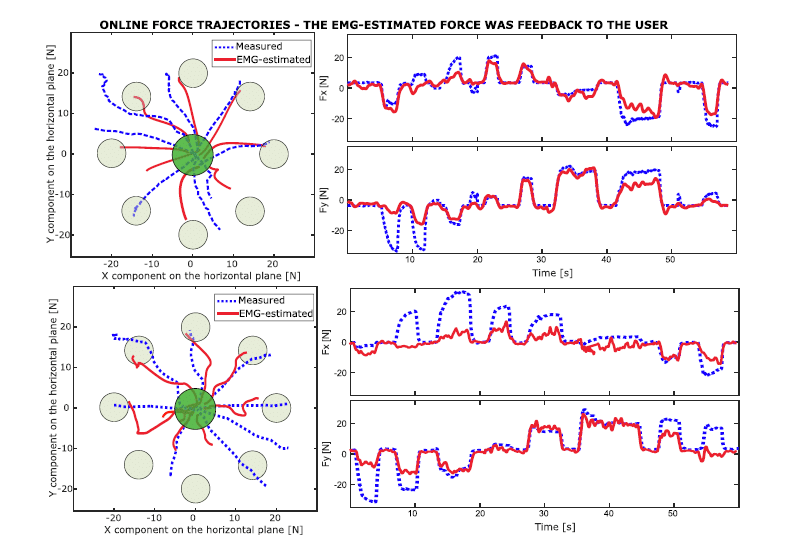
In this paper, the authors propose a method able to compute the synergies-to-force mapping of a new limb pose by interpolation, with the knowledge of the synergies-to-force mapping related to a limited set of limb poses. The proposed interpolation-based approach has been evaluated on three different kind of mappings: muscle-to-force, “Pose-Shared” synergies-to-force and “Pose-Related” synergies-to-force. The muscle-to-force mapping considers a direct map between muscles and hand force. Both synergies-to-force approaches consider a map between muscle synergies and hand force, but, the “Pose-Shared” mapping assumes that the muscle patterns can be factorized using data coming from different limb poses, whereas the “Pose-Related” one assumes that each pose has its own set of muscle primitives that can be clustered together. The generalization capability of the proposed approach has been evaluated by comparing performances obtained in untrained conditions with the ones obtained in trained upper limb poses. Results showed that synergies-based approach substantially reduce the performance loss when tested on untrained upper-limb’s poses, demonstrating that muscle synergies may be suitable to be shared across different working conditions. Moreover, the feasibility of the proposed approach has been preliminary tested in an online condition, demonstrating that the subject was able to accomplish the force task by controlling a virtual cursor with his muscular activations